Uppdaterad 20141224:
Nu har jag gjort några simuleringar och skall visa här. Tack Daniel för informationen.
Frågan var alltså vad blir skillnanden mellan dithering och darksubtraction i bilden och praktiskt handhavande.
Har inte tagit hänsyn till bias som man har i kameran för att klara negativa signaler. Men ni ser direkt i resultaten varför kameratillverkarna måste lägga till detta. Utan detta blir det katastrof i bildbehandlingen om de helt sonika klippt de negativa signalerna. Värdena på y-axeln är tänkt att vara efter man subtraherat bias, annars skulle man inte ha negativa värden. Sensorn är tänkt att ha kolumndefekter (statisk fel) samt brus (slumpartat) som är summan av allt brus i kameran, lite förenklat som vanligt då det finns brus och brus. Kolumndefekter är sådant ni kan se när ni kontrastförstärker bilden under bildbehandlingen, yttrar sig som linjer över bilden, ofta från botten till toppen. Syns tydligast i bakgrunden och blir väldigt fult.
För enkelhetens skull är detta ett linjediagram, till ex. en rad i sensorn. Alla diagram i samma skala och längst till höger finns förklaringar till staplarna. Staplarnas höjd motsvarar den totala signalen räknat i till ex. ADU, alltså mycket låga signaler och det är ju där bruset och fixed pattern är mest störande. De olika delarna är staplade på varandra, inte adderade som jag egentligen ville men fördelen är att de olika delarna får olika färger för tydlighetens skull.
- 01 dither vs darks.jpg (43.33 KiB) Viewed 6004 times
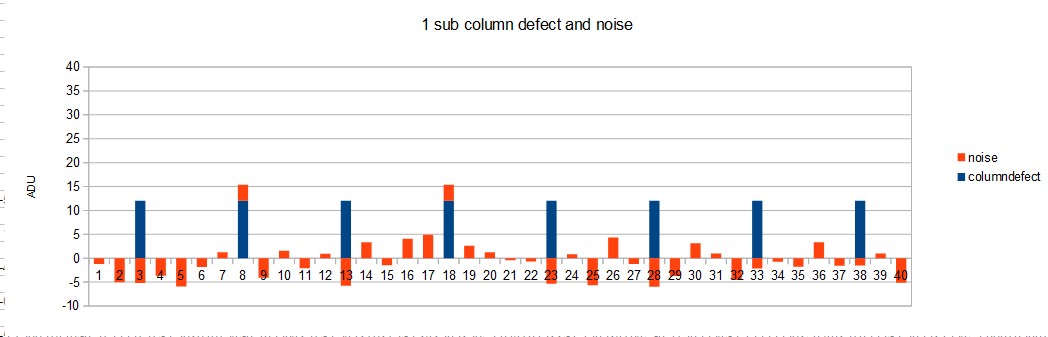
Här är första exemplet, 1st subbild. Ingen signal men kamerans slumpmässiga brus (orange) samt ett statiskt kolumnfel (blått) som yttrar sig som en högre signal, hot pixel är något liknande men hot pixel tar man lätta bort med "hot pixel remove" som brukar finnas i de flesta program. Kolumndefekterna är svårare att få bort utan att ta darks men det går med lite matematiska knep. Kolumndefekter är dock inte helt statiskt men ganska lika från bild till bild vid samma iso, exponeringstid och temperatur.
- 02 dither vs darks.jpg (41.24 KiB) Viewed 6004 times
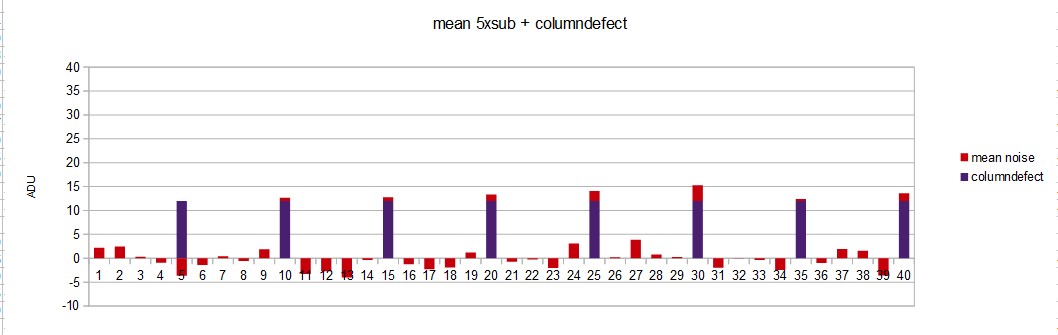
Samma bild men nu är 5 subbar medelvärdesbildade. Som synes minskar det slumpmässiga bruset men inte det statiska.
- 03 dither vs darks.jpg (47.77 KiB) Viewed 6004 times
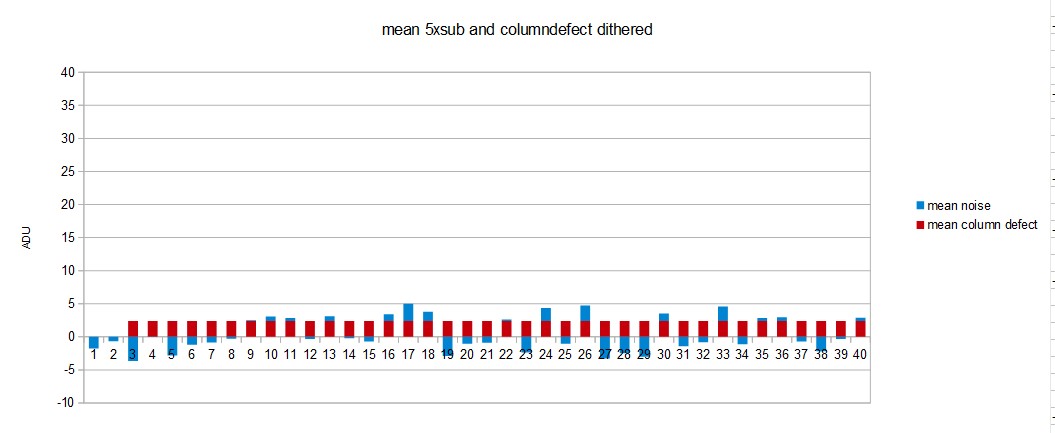
Här är 5 bilder med dithering, har flyttats i ett 5x5 pixel stort område, eller som här 5 pixlar längs raden. Här syns hur det statiska kolumnfelet (rött) jämnar ut sig medans det slumpmässiga bruset blir lika i nivå som i föregående exempel.
- 04 dither vs darks.jpg (39.07 KiB) Viewed 6004 times
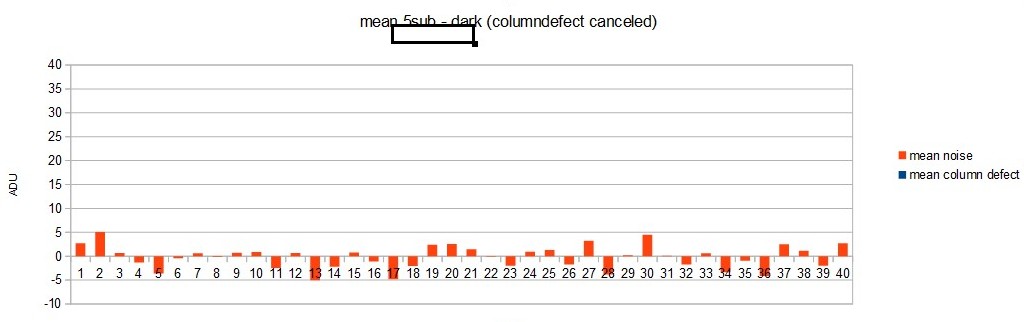
Här har 5 bilder subtraherats med 5 darks. Så som man vanligen gör. Nu ser man att det statiska felet har försvunnit helt. Dock har det slumpmässiga bruset ökat! Ca 1.4 gånger högre eller mer exakt roten ur 2. Det är ju inte bra och därför slösar man med antalet darks. Men antalet kan kan bli orimligt högt och man gör kompromisser. I verkligheten är inte de statiska delarna så perfekt lika mellan bilderna heller som nämndes i början. Om man hade 10 gånger fler darks än objektbilder skulle brustillskotet bli litet, men om man har 100 objektbilder blir det ju orimligt då det skulle kräva 1000 darks. I ett sådant läge kan det bli att man har färre darks än objektbilder och då tillför man relativt kraftigt brus för att få bort de statiska felen. Nu är det dock så att själva objektet också har ett brus samt att bakgrundsljuset ger ett kraftigt brustillskott som gör att det inte blir riktigt så allvarligt. Vid smalbandfoto, Halpha till ex. har man i regel lågt bakgrundsljus och litet brustillskott från detta, då blir ovan mer framträdande.
- 05 dither vs darks.jpg (37.85 KiB) Viewed 6004 times
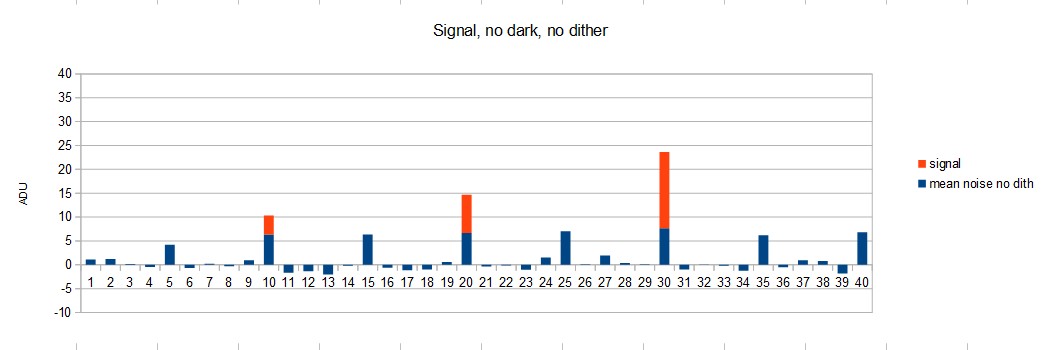
Här bild med simulerad signal i 3 olika nivåer (orange) statiskt och brus i blått. Den här bilden är inte darkssubtraherad inte heller dithering. Här kan det bli svårt att urskilja de svagaste signalerna ur bruset, svårare än nödvändigt skall man kanske säga, för det finns alltid mer att se ju bättre teknik man har.
- 06 dither vs darks.jpg (42.65 KiB) Viewed 6004 times
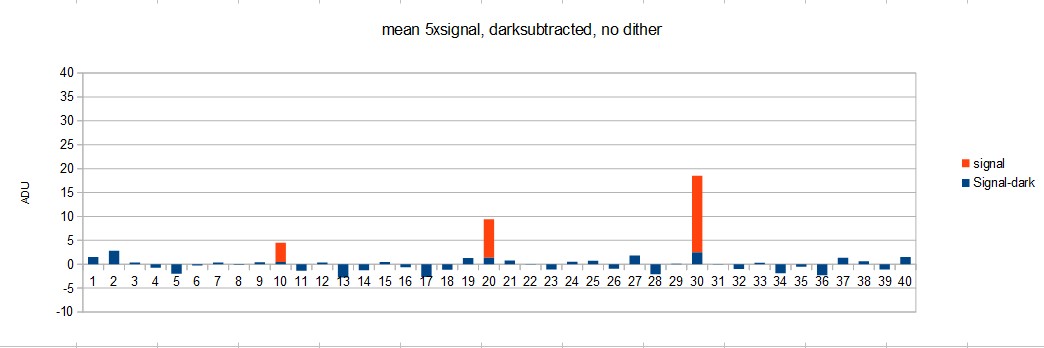
Sist samma bild som ovan men med darksubraction. Statiska felet försvann men bruset ökade med en faktor roten ur 2. Att det blir just denna faktor i mina exempel har att göra med att antalet darks är lika med antalet objektbilder.
Hade man dessutom gjort en dithering på den sista bilden och samtidigt gjort darksubtraction hade det inte blivit någon skillnad eftersom dithering bara är bra för de statiska felen i mitt idealiska exempel. I verkligheten är de statiska felen inte helt perfekt lika mellan bilderna, så man vinner ändå på att använda dithering. Ofta skiljer ju temperaturen lite grand mellan bilderna och sensorn åldras lite med tiden. Darks är lite färskvara kan man se det som.
Att bygga upp ett Darksbibliotek samt underhålla det är ju mycket tidsödande samt ganska tråkigt. För kameror med låga statiska störningar kanske man kan ersätta darks med dithering och några andra smarta matematiska metoder. Då är det mycket vunnet. Just dithering är en sådan teknik som kan vara värt att ägna lite tid åt. Andra är hot pixel map (som kräver darks men inte skall användas till objektbilden, bara för att finna hotpixel), kolumndefektfilter (finns det i programmen ni använder?), selektiv noisereduction filter (filter som bara är aktivt där det behövs, till ex. där signalen är låg), mörkerströmmen subtraherar man bort med en konstant. Fourierfilter kan vara effektiva på att få bort fixedpattern. Det finns många saker i kameran som avgör vilken metod som blir bäst, också objektets egenskaper. Kamerans fixedpattern, mörkerström, temperaturstabilitet osv.
Om man anväder darksubtraction, man har i regel inte ett komplett darks bibliotek, speciellt till dslr kameror som inte har stabil temperatur. Man kanske har med 5 graders mellanrum på sin höjd, har man dessutom blandat in olika isotal och binning som man kan göra på CCD kameror blir det otrloligt många kalibreringsbilder att hålla reda på. För just olika temperaturer och exponeringstid finns det knep i de flesta program att ta till när man kalibrerar på det sätet att programmet räknar fram en skalfaktor för darksen så att de matchar bättre mot objektbilden även fast temperaturen är olika.
När jag provat dithering så har jag märkt att det ibland är svårt att få guidekameran låsa efter en dithering (flytt) på objektet stabilt. Gör det inte det får man rörelseoskärpa på subbarna, man får anpassa pausen mellan bilderna så att det hunnit stabilisera sig. Programmet som styr dithering ligger i rehel i kamerakontrollprogrammet som styr monteringen. Har man guidad vilket ofta är fallet måste det också vara ihopkopplat. Tidigare använde jag Astrojan Tools till at styra Canon kameran, EQMOD för att kontrollera EQ6 monteringen, PHD för att kontrollera guide kameran. Nu har jag istället APT, EQMOD och PHD2 och har faktiskt inte hunnit prova denna kombination. Jag gör ju fortfarande de flesta bilderna från balkongen så duger inte för att visa men bra för att utvärdera teknik.
Kommer nog komplettera med text här samt ev. rätta till fel som blivit, kanske ett excelark för att testa olika brusbidrag för olika tekniker. Så tag en titt igen längre fram.
En liten fråga, hur många av er som inte redan vet detta, hur intressant är det att läsa om detta och liknande saker? Bara så jag inte lägger ned massor med tid på något som uppfattas som ointressant.
/Lars